
Ir-robot tal-gantry jikkonsisti f'qafas tal-kolonna, komponent tal-assi X, komponent tal-assi Y, komponent tal-assi Z, tagħmir u kaxxa ta 'kontroll.
Huwa tagħmir industrijali kompletament awtomatiku bbażat fuq is-sistema ta 'koordinati tridimensjonali X, Y, Z rettangolari, li tista' taġġusta l-pożizzjoni tal-biċċa tax-xogħol jew tirrealizza l-moviment tat-trajettorja tal-biċċa tax-xogħol. Il-qalba tal-kontroll tagħha hija implimentata permezz ta 'kontrolluri industrijali.
Il-kontrollur janalizza u jipproċessa diversi sinjali ta 'input, jagħmel ġudizzji loġiċi, imbagħad joħroġ kmandi ta' eżekuzzjoni lil kull komponent ta 'output biex itemm il-moviment konġunt bejn l-assi X, Y, u Z u jirrealizza sett komplut ta' proċessi ta 'operazzjoni kompletament awtomatiċi.
Jintuża fl-assemblaġġ u t-trasport tal-prodott, sistemi ta 'conveyor, u siti ta' xogħol bla ekwipaġġ. Jista 'jintuża bħala tagħmir periferali importanti għal ħażna temporanja u loġistika u jista' jitqabbel b'mod flessibbli ma 'tagħmir ospitanti għal użu faċli. Applikazzjoni Industriji involuti fi: assemblaġġ finali, sub-assemblaġġ, ipproċessar, ittestjar, debugging u trasport ta 'prodotti u hekk iben.
Il-karatteristiċi tal-prodott huma li jgħinu lill-klijenti jsolvu l-problemi ta 'effiċjenza baxxa jew riskji ta' immaniġġjar għoljin f'diversi tipi ta 'tqandil tal-materjal, sabiex inaqqsu b'mod konvenjenti u malajr ir-riskji tal-immaniġġjar, jiffrankaw ħin, sforz, jiffrankaw ix-xogħol u saħansitra jissostitwixxu x-xogħol.
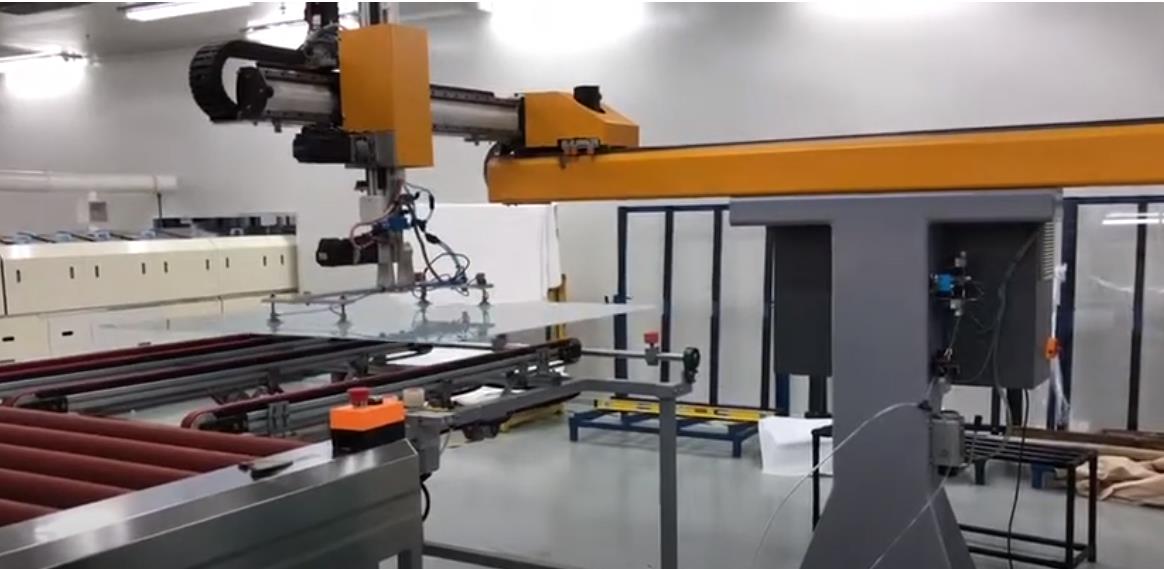
 Dan l-apparat tal-immaniġġjar tal-manipulatur tal-irfid tal-gantry għall-ħġieġ jinkludi kolonni u travi trasversali installati fuq il-kolonni. Ir-raġġi trasversali huma installati b'binarji slide. Il-binarji slide huma installati b'apparat li jiżżerżaq trasversali. L-apparat li jiżżerżqu trasversali huwa installat b'apparat li jiżżerżqu vertikali u apparat pnewmatiku ta 'ġbid ta' ġbid. Jista 'jiġi realizzat Il-mekkaniżmu tat-trasport jiċċaqlaq f'punt fiss fl-ispazju tridimensjonali, jiġbed il-ħġieġ permezz tat-tazza tal-ġbid, L-ewwel imxi lateralment fuq l-assi X, imbagħad aqleb 90 grad għall-pożizzjoni indikata, u mbagħad ċċaqlaq 'il fuq u 'l isfel fuq l-assi Y. Wara li tilħaq il-pożizzjoni stabbilita, itlaq il-ħġieġ u poġġiha fuq l-ixkaffa tal-ħġieġ. L-istabbiltà strutturali tal-apparat kollu hija għolja ħafna, li ttejjeb ħafna l-immaniġġjar. effiċjenza.
Dan l-apparat tal-immaniġġjar tal-manipulatur tal-irfid tal-gantry għall-ħġieġ jinkludi kolonni u travi trasversali installati fuq il-kolonni. Ir-raġġi trasversali huma installati b'binarji slide. Il-binarji slide huma installati b'apparat li jiżżerżaq trasversali. L-apparat li jiżżerżqu trasversali huwa installat b'apparat li jiżżerżqu vertikali u apparat pnewmatiku ta 'ġbid ta' ġbid. Jista 'jiġi realizzat Il-mekkaniżmu tat-trasport jiċċaqlaq f'punt fiss fl-ispazju tridimensjonali, jiġbed il-ħġieġ permezz tat-tazza tal-ġbid, L-ewwel imxi lateralment fuq l-assi X, imbagħad aqleb 90 grad għall-pożizzjoni indikata, u mbagħad ċċaqlaq 'il fuq u 'l isfel fuq l-assi Y. Wara li tilħaq il-pożizzjoni stabbilita, itlaq il-ħġieġ u poġġiha fuq l-ixkaffa tal-ħġieġ. L-istabbiltà strutturali tal-apparat kollu hija għolja ħafna, li ttejjeb ħafna l-immaniġġjar. effiċjenza.

Ħin tal-post: Mar-18-2024



